近年,公共施設や大型商業施設など様々な人々が行きかう空間における歩行者の人流解析の重要性が高まっている.人流データは,新型コロナウィルスの感染拡大に対する混雑状況のモニタリング,施設内の動線・広告配置の最適化,災害時の避難計画の設計に利活用されている.
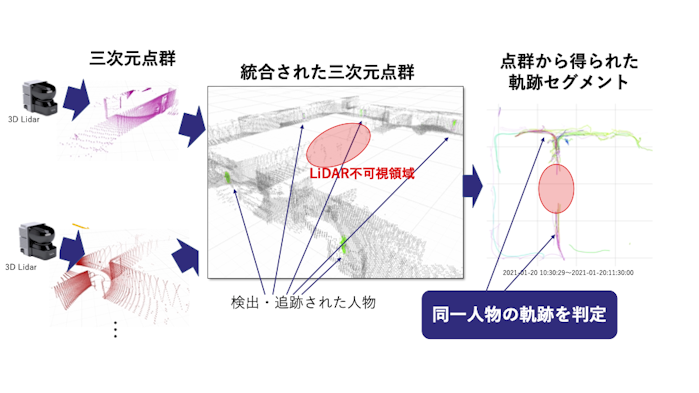
山口研究室では,3次元測域センサ(LiDAR)を用いた歩行者のトラッキングシステム「ひとなび」を開発している.「ひとなび」は固定設置した複数LiDARからの3次元点群からの人物検出およびトラッキングを行うことで,一般的なカメラによる人物追跡で生じるプライバシー上の懸念を抑えて,LiDARの可視範囲内での歩行者移動軌跡のリアルタイム出力を可能にする.
しかし,センサコストや建造物の構造上の制約により,欠損なく関心領域全てをカバーするようなLiDAR設置は困難であることが多い.そこで本研究では,点群から得られた歩行者軌跡に対する人物再識別手法を提案する.
提案手法では
- 点群から得られる人物固有の特徴の類似性
- 建物レイアウトや過去の移動軌跡パターンにも基づく軌跡の時空間的な整合性
の2つの観点から,全軌跡ペアに対してそれが同一人物によるものである確率を求め,軌跡の再接続(マッチング)を実現する.また一定期間において特に高い確度でマッチングできた軌跡を抽出し,それらを以降の教師データとして利用することで,その空間固有のパターンを逐次的に学習し,マッチング精度の自動的な向上を可能にする.
発表論文:
- 大野真和, 右京莉規, 天野辰哉, & 山口弘純. (2022). 3 次元点群を用いた時空補間的アプローチに基づく人物軌跡構成法の提案. マルチメディア, 分散, 協調とモバイルシンポジウム 2022 論文集, 2022, 859-871.
- 大野真和, 右京莉規, 天野辰哉, & 山口弘純. (2023). 点群特徴量と拡散モデルを用いた人物軌跡再構成手法の提案. マルチメディア, 分散, 協調とモバイルシンポジウム 2023 論文集, 2023, 1293-1303.
- Masakazu Ohno, Riki Ukyo, Tatsuya Amano, Hamada Rizk and Hirozumi Yamaguchi, "Privacy-preserving Pedestrian Tracking using Distributed 3D LiDARs", In proc. of 2023 IEEE International Conference on Pervasive Computing and Communications (PerCom 2023) , pp.43--52
- IEEE xplore: https://ieeexplore.ieee.org/document/10099061
- Arxiv: https://arxiv.org/abs/2303.09915
- Ohno, M., Ukyo, R., Amano, T., Rizk, H., & Yamaguchi, H. (2024). Privacy-preserving pedestrian tracking with path image inpainting and 3D point cloud features. Pervasive and Mobile Computing, 100, 101914.





