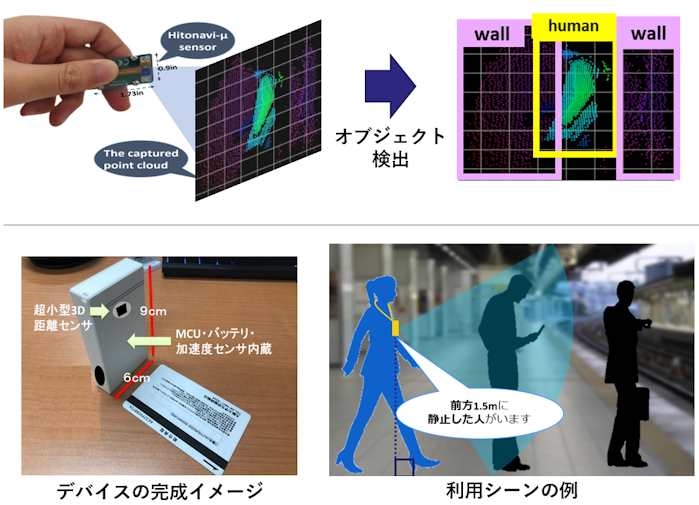
3-D認識の技術は、自動運転における障害物検知やロボティクスの分野で注目され、急速に発展しています。この3-D認識に用いられる代表的なセンサが3次元測域センサ(LiDAR)です。LiDARはレーザー光を物体に照射しその光が返ってくるまでの時間を用いることで、物体までの距離や形状(3次元点群)を知ることができます。
当初は高額で大型だったLiDARですが、研究開発が進んだことで低価格化や小型化が進み、スマートフォンに組み込めるほどになりました。本研究では、その小型化LiDARセンサを組み込んだウェアラブルデバイス上で動作する、3次元点群から障害物を検出する手法の提案に取り組んでいます。
この手法を搭載したデバイスの実現が、視覚障碍者の移動支援に大きなインパクトを与えます。現在、視覚障碍者の多くは白杖や盲導犬・晴眼者によるサポートを受けて移動していますが、白杖は障害物の検知範囲が狭く、都市部では移動にストレスがかかり、盲導犬・晴眼者によるサポートはコスト面で課題が残ります。このデバイスを用いることで、白杖よりも広範囲の障害物検出を可能にし、周辺環境を解析することで音声による通知も可能になると考えています。
この実現のためには、既存手法の軽量化と、ウェアラブルデバイス特有のノイズデータ除去が必要です。既存のオブジェクト検出手法の多くは高性能なコンピュータを利用しており、処理能力で劣るウェアラブルデバイス上で、オブジェクトの検出を行うのは不可能です。また、ウェアラブルデバイスは装着者の移動により揺れが生じるため、移動方向の周辺環境を捉えられないデータも含まれてしまいます。そのようなノイズデータを、デバイスに搭載された慣性センサなどを用いて除去する必要があります。私たちは現在これらの課題に取り組み、バリアフリーな社会実現の一助になればと考えています。
発表論文
- Rizk, H., Okochi, Y., & Yamaguchi, H. (2022, October). Demonstrating hitonavi-μ: a novel wearable lidar for human activity recognition. In Proceedings of the 28th Annual International Conference on Mobile Computing And Networking(MobiCom2022, CORE RANK A*) (pp. 756-757). Best Demo Awards, https://dl.acm.org/doi/10.1145/3495243.3558744
- Okochi, Y., Rizk, H., Amano, T., & Yamaguchi, H. (2022, October). Object recognition from 3d point cloud on resource-constrained edge device. In 2022 18th International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob) (pp. 369-374). IEEE., https://ieeexplore.ieee.org/document/9941552
- 大河内悠磨, Hamada Rizk, 山口弘純. (2022, August). 可搬型 3 次元空間センシングデバイスを用いた軽量なリアルタイム物体検出. In IEICE Conferences Archives. The Institute of Electronics, Information and Communication Engineers, FIT2022, FIT船井ベストペーパー賞, https://www.ieice.org/publications/conference-FIT-DVDs/FIT2022/data/html/program/pdf/CM-002.pdf
- 大河内悠磨, Hamada Rizk, 山口弘純. (2022). 軽量可搬型 3 次元空間センシングデバイスの設計開発. マルチメディア, 分散, 協調とモバイルシンポジウム 2022 論文集, 2022, 171-178., ヤングリサーチャー賞, https://ipsj.ixsq.nii.ac.jp/records/219598
- Okochi, Yuma, Hamada Rizk, and Hirozumi Yamaguchi. "On-the-fly spatio-temporal human segmentation of 3d point cloud data by micro-size lidar." 2022 18th International Conference on Intelligent Environments (IE). IEEE, 2022., https://ieeexplore.ieee.org/document/9826758





