本研究では、高速道路の合流地点を予測するための軽量な機械学習フレームワークを提案する。従来の深層学習手法とは異なり、本モデルは高い精度を維持しつつ、学習および推論のコストを抑えた実用的なソリューションを提供する。本システムでは、固定カメラで撮影した映像からYOLO v5を用いて車両を検出し、新規開発した独自のトラッカーを用いて車両を追跡する。その後、得られたデータを基に車両の合流情報を生成し、eXtreme Gradient Boosting (XGBoost) を用いて合流地点の予測を行う。本モデルは、多変量重回帰分析を活用し、合流車両およびその周囲4台の車両の位置と速度を考慮した上で、合流車線における複数の意思決定点を予測する。これらの意思決定点は、人間運転者の意思決定プロセスを模倣するものであり、合流行動の精度向上に寄与する。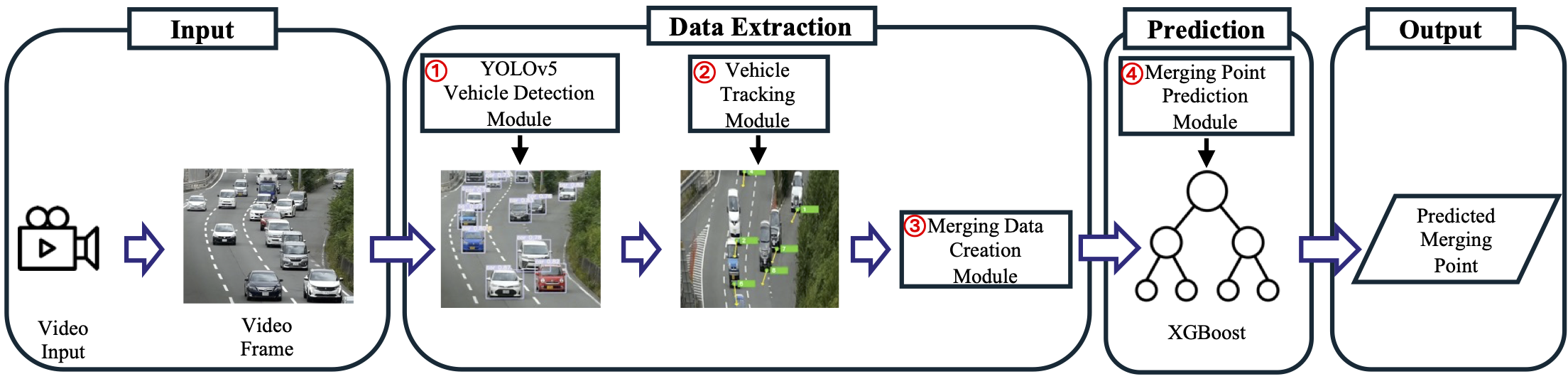
発表論文
- Doyoon Lee, 廣森 聡仁, 高井 峰生, 山口 弘純, 西村 友佑, 長村 吉富, 竹嶋 進, "Lightweight Merging Point Prediction on Highway On-Ramps Using Regression Techniques", 7月, DICOMO 2024, https://ndlsearch.ndl.go.jp/books/R100000136-I1050020444520872448
- Doyoon Lee, Akihito Hiromori, Mineo Takai, Hirozumi Yamaguchi. Efficient On-Ramp Merging Point Prediction Using Machine Learning. 27th IEEE International Conference on Intelligent Transportation Systems (ITSC 2024). 2024, https://its.papercept.net/conferences/scripts/abstract.pl?ConfID=87&Number=703





