近年,公共施設や商業施設など様々な人々が行きかう空間における人流検知の需要が高まっている.COVID-19感染拡大防止のため,ビルや施設の事業者や管理者は人流計測により施設利用者数の把握や密検知を行う必要性に追われている.感染防止のみならず,滞在者数を常時把握しておくことは,地下街などの構内において突発的な火災やゲリラ豪雨等による水害の危険性に対しても効率的な避難誘導につなげることができる.
画像処理技術の飛躍的な発展により,近年ではRGB動画像などから人物を検出するシステムや手法も数多いものの,それらは基本的に顔などの個人情報を含む情報を直接取得するものであることから,利用後ただちに廃棄される場合にも通行者のプライバシーへの不安を払拭することは難しい.これに対し,物体への距離情報のみを取得する3次元測域センサ(LiDAR)や深度カメラなどの3次元距離センサを用いて,より低いプライバシーリスクで人物の存在や姿勢を検出する手法が注目を集めている.3次元距離センサは赤外線パターンの照射とカメラ視差を用いる方法や,赤外線ビームのToF(Time of Flight)計測により,センサからの各方位に対し最も近い物体への距離を計測し,3次元点群を構成する.
3次元点群を用いる人物検出手法の多くは定位置の人物の姿勢検出を目的としており,歩行者同士が視野を遮る状況は基本的に想定されていない.一方,公共空間における人流検知では人物同士のオクルージョンや太陽光などにより,人物を捉えた点群情報は不完全であることが多い.我々は3次元LiDARを通行者の多い市街地に設置し取得した通行者の3次元点群を用いて,歩行者のトラッキング(軌跡導出)を行う手法を提案している.提案手法では,点群の欠損および複数人物の接近による点群の結合といった点群の不完全性による人物セグメントの検出失敗を考慮し,複数歩行者の点群が合体して単一のセグメントとして観測される場合および単一人物の点群が複数のセグメントとして観測される場合の2つの状況の推定とカルマンフィルタによるトラッキングを組み合わせることで,堅牢なトラッキングを実現する.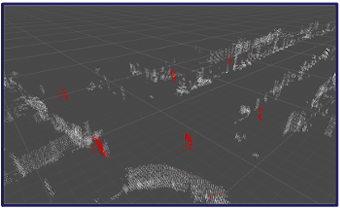
![]()
デモ動画
発表論文
- 右京莉規, 扇田幹己, 山田遊馬, 廣森聡仁, 山口弘純, & 東野輝夫. (2020). 三次元深度センサーを用いた移動制約者検出手法の提案と評価. マルチメディア, 分散協調とモバイルシンポジウム 2204 論文集, 2020, 1280-1289.
- 右京莉規, 廣森聡仁, 山口弘純, & 東野輝夫. (2020). 公共空間における三次元点群の不完全性に対して堅牢な歩行者トラッキング手法. 研究報告マルチメディア通信と分散処理 (DPS), 2020(2), 1-8.
- 右京莉規, 天野辰哉, 廣森聡仁, 山口弘純, & 東野輝夫. (2021). 多様な人物属性を考慮した堅牢なトラッキング手法の実装と評価. 研究報告モバイルコンピューティングと新社会システム (MBL), 2021(25), 1-8.
- 右京莉規, 天野辰哉, 廣森聡仁, 山口弘純, & 守屋充雄. (2021). 複数 LiDAR による大規模三次元点群を用いた歩行者トラッキング手法の実装と評価. 研究報告モバイルコンピューティングと新社会システム (MBL), 2021(28), 1-7.
- Riki Ukyo, Tatsuya Amano, Akihito Hiromori and Hirozumi Yamaguchi, "Pedestrian Tracking in Public Passageway by Single 3D Depth Sensor", Proceedings of the 2022 IEEE International Workshop on Pervasive Computing for Vehicular Systems Co-located with IEEE PerCom 2022, pp. 581-586
- 右京莉規, 天野辰哉, 廣森聡仁, & 山口弘純. (2022). 3 次元点群を用いた高密度群衆の人数推定手法. マルチメディア, 分散, 協調とモバイルシンポジウム 2022 論文集, 2022, 852-858.
- 右京 莉規, 天野 辰哉, 廣森 聡仁, 山口 弘純, 東野 輝夫, "公共空間における三次元点群の不完全性に対して堅牢な歩行者トラッキング手法", 情報処理学会論文誌, Vol.63, No.8, pp.1361-1370 (2022-08-15)
- 右京莉規, 天野辰哉, & 山口弘純. (2023). 3 次元点群を用いた不規則に移動する高密度群衆下での歩行者トラッキング. マルチメディア, 分散, 協調とモバイルシンポジウム 2023 論文集, 2023, 986-995.
- Ukyo, R., Amano, T., Rizk, H., & Yamaguchi, H. (2023, September). Pedestrian tracking using 3d lidars–case for proximity scenario. In 2023 IEEE 26th International Conference on Intelligent Transportation Systems (ITSC) (pp. 4683-4689). IEEE.





