自動運転において、センサーは周囲環境を認識し、安全な運転を実現する重要な役割を担います。しかし、悪天候や低照度環境ではセンサーの性能が低下し、認識精度が不安定になるため、自動運転車が正確な運転判断を下すことが困難になります。そのため、自動運転車が適切に対応できるよう、天候や時間帯などの環境条件を正確に認識することが重要です。
近年、畳み込みニューラルネットワーク(CNN)やビジョン・トランスフォーマー(ViT)などの深層学習モデルを用いることで、高精度な環境条件の分類が可能になっています。しかし、医療分野と同様に、自動運転は人命に関わる安全性が求められる領域であり、モデルの判断根拠を理解することが信頼性の確保に不可欠です。深層学習モデルは判断過程が不透明であるため、その信頼性や説明可能性を確保することが課題となっています。
そこで本研究では、車載カメラ画像を入力として、深層学習の高い分類性能を活かしつつ、決定木代理モデルを用いて分類結果の解釈性を向上させる手法を提案します。この手法により、モデルの判断根拠を明確化し、自動運転の安全性と信頼性の向上に貢献することを目指します。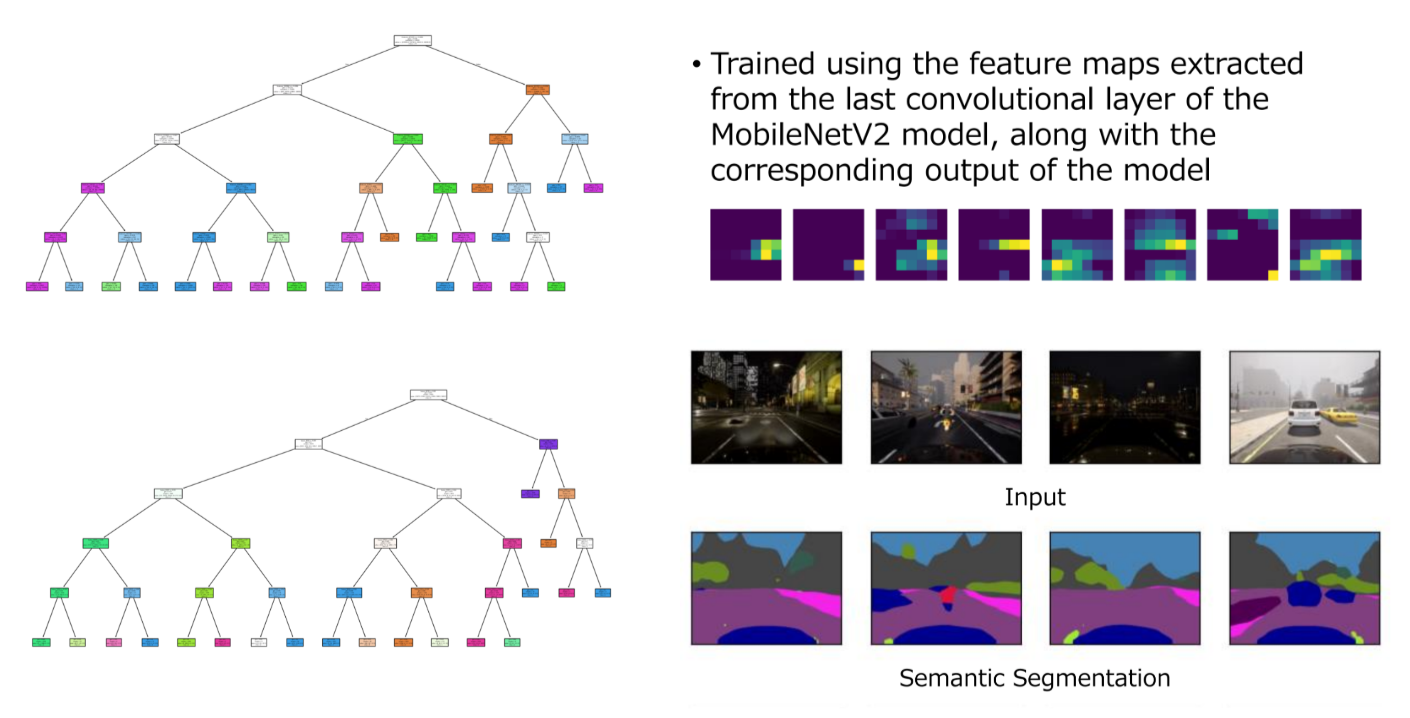
決定木代理モデルを用いた自動運転のための解釈可能な環境条件認識
キーワード
自動運転 環境条件認識 CNN 代理モデル 決定木





