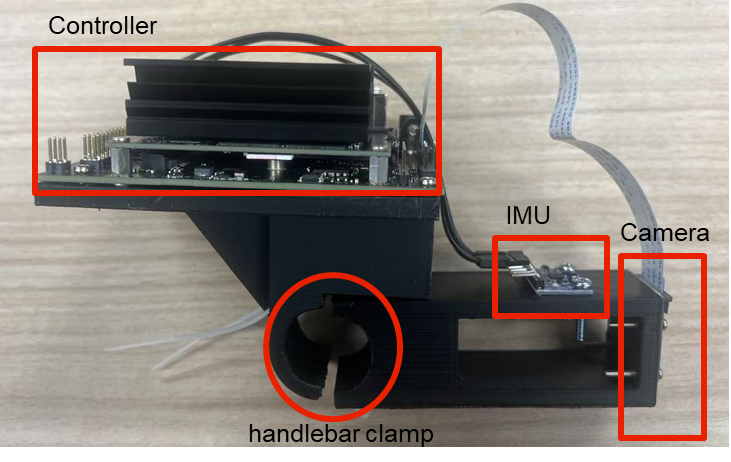
近年、電動キックボード(E-Scooter)は、マイクロモビリティ(Micromobility)の重要な手段の一つとして、世界中で急速に普及しています。その利便性、低炭素排出、および都市適応性の高さから、多くの都市がこれをシェアリング交通システムに組み込んでいます。しかし、電動キックボードの普及に伴い、それに起因する交通事故の件数も顕著に増加しています。電動キックボードは、車道だけでなく歩道も走行するため、安全性確保の課題が大きく、さらに、その制御モジュールのサイズ、使用可能なセンサーの種類、電力供給などの制約により、既存の自動車向けの自動運転や安全支援システムは十分に適用できません。本研究の主な目的は、小型エッジコンピューティングデバイス上で、多様な走行環境においてリアルタイムに危険予測と経路推奨を行うシステムを実現することです。将来的には、これをノードとして活用し、より高度なスマートシティ交通支援ネットワークの構築を目指します。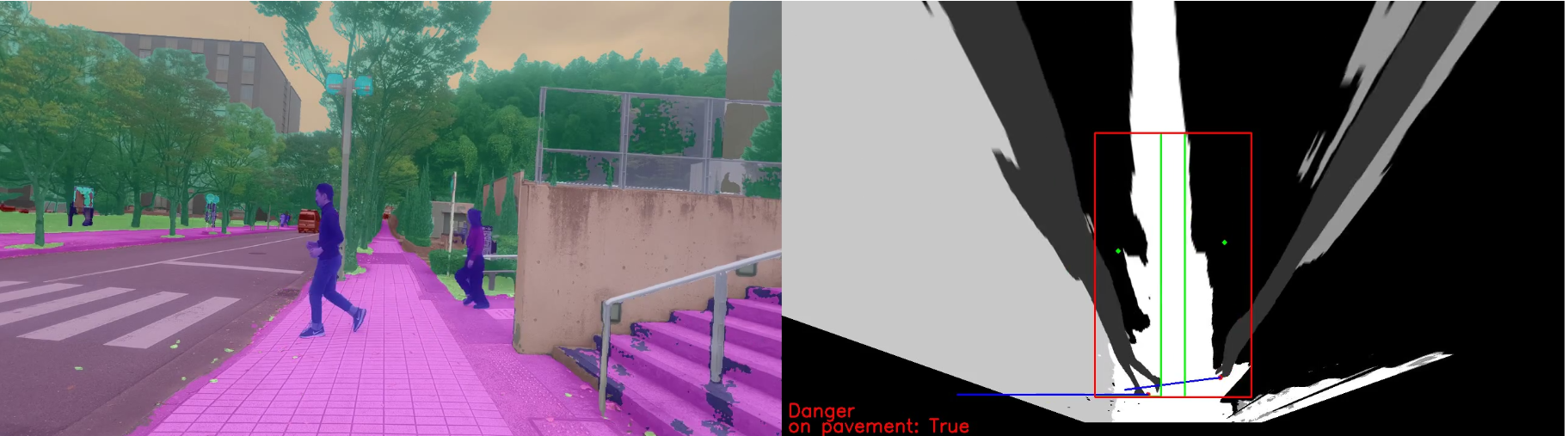
電動キックボードの交通安全支援システム
キーワード
電動スクーター マイクロモビリティ 交通安全 エッジコンピューティング リアルタイム危険予測 ルート推薦 安全支援システム





