現代社会の基盤である交通システムは、経済活動と市民生活を支える一方で、交通渋滞による時間的・経済的損失、依然として後を絶たない交通事故、 環境への負荷増大、地域間の移動格差、そして物流の非効率性といった多くの課題を内包しています。 これらの複合的な課題に対し、デジタルツインやCyber-Physical System (CPS) データ駆動型のアプローチに基づいた研究が進められています。 例えば、車両プローブデータやインフラセンサーから得られる情報をリアルタイムに分析し、精度の高い混雑予測・緩和策を導き出すことで、交通渋滞の緩和や事故の予防を図ります。 また、物流分野やオンデマンド交通サービスにおいては、組合せ最適化や機械学習の手法を用いた配送・配車最適化アルゴリズムの開発により、 運行効率の大幅な向上が期待されています。 他にも交通シミュレーション技術、運転・移動支援技術、運転自動化に向けた研究に取り組んでいます。
合流動作のAI化 Doyoon Lee, Akihito Hiromori, Mineo Takai, Hirozumi Yamaguchi, "Efficient On-Ramp Merging Point Prediction Using Machine Learning", 27th IEEE International Conference on Intelligent Transportation Systems (ITSC 2024). 2024

- LiDARと広域GPSデータを用いた歩行者流動のシミュレーション Masashi Uegaki, Tatsuya Amano, Hirozumi Yamaguchi, "Simulating Urban Pedestrian Flows by Fusing Wide-Area Location Data and Spot Pedestrian Counts" EAI MobiQuitous 2024 (BEST PAPER AWARD)
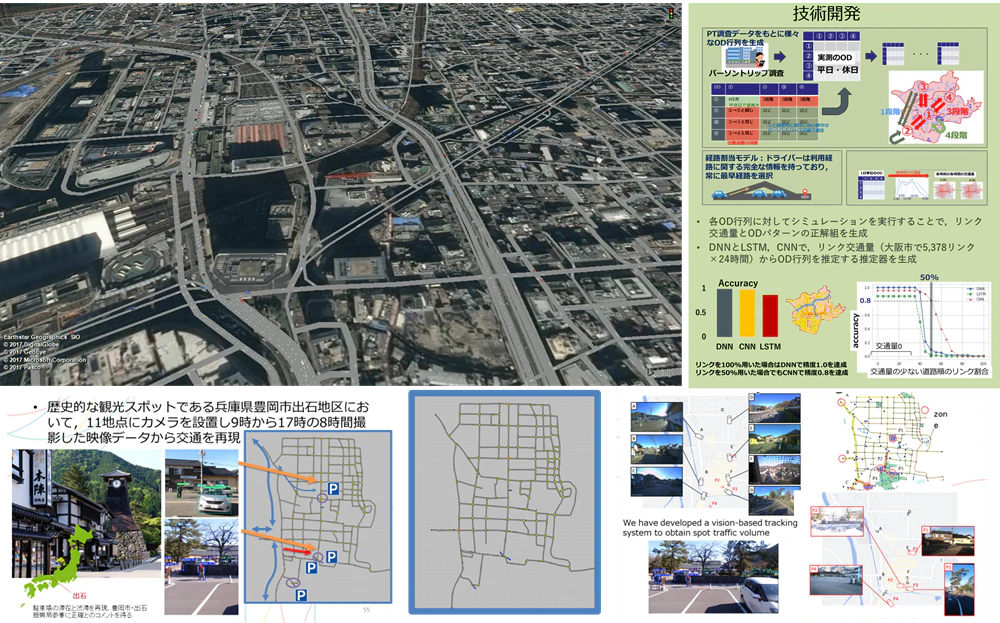
- NICT受託研究 STEAM: スマートコミュニティを支えるエネルギーとモビリティを対象としたセキュアな高信頼フレームワーク 豊岡市・大阪市の交通シミュレーション
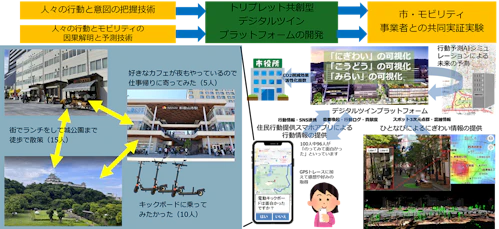


NICT受託研究「街の未来を共視する ~住民・自治体・事業者のトリプレット共創型デジタルツイン~」 人々のスマートフォンやインフラ型センサから得られる行動データを基に、新たな移動手段の導入効果と行動変化を予測し、その結果を3次元仮想空間に投影するデジタルツインプラットフォームを開発。 住民・自治体・事業者という三者が協力して街づくりを行う「トリプレット共創」の実現を目指し、和歌山市での電動モビリティ導入による実証実験を通じて効果検証を実施。
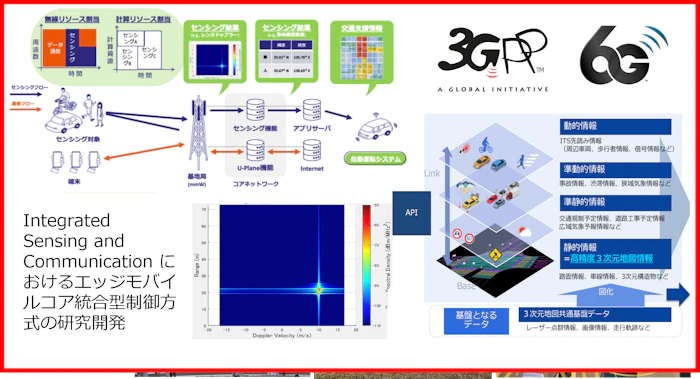
NICT受託研究 「Integrated Sensing and Communicationにおけるエッジモバイルコア統合型制御方式の研究開発」 ISAC(Integrated Sensing and Communication): 無線通信とセンシング(レーダーなどの環境検知)を単一のシステムで統合的に実現する技術
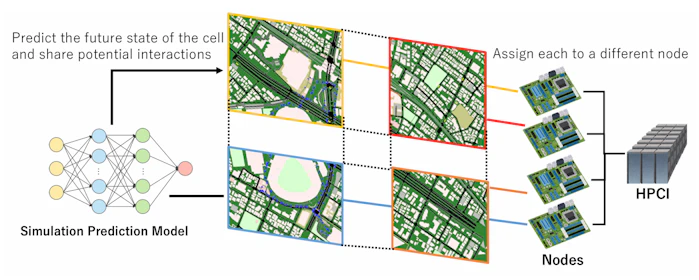
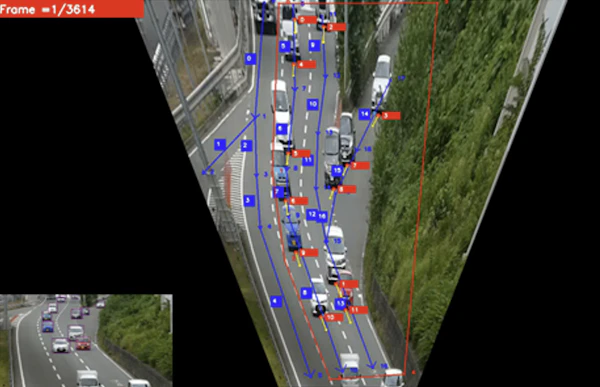
高性能計算基盤上での並列マルチエージェントシミュレーションによる交通評価プラットフォーム Fukuharu Tanaka, Haruki Yonekura, Hirozumi Yamaguchi, "Policy Evaluation Platform for Parallel Multi-Agent Simulation on High Performance Computing Infrastructure", SupercomputingAsia2025 Poster











