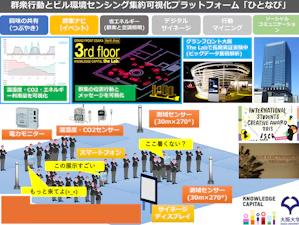
急速な都市化とそれに伴う人口集中は、エネルギー消費の増大、インフラの老朽化と維持管理コストの増加、交通システムの非効率性、環境負荷の増大、 そしてコミュニティにおける新たな社会的課題などを顕在化させています。 これらの課題に対し、IoT・3次元センシング・空間コンピューティング技術とデジタルツインやサイバーフィジカルシステム(CPS)、データ駆動型のアプローチに基づき、 都市機能全体の最適化と持続可能性の向上、さらには居住者の生活の質(QoL)向上を目指すスマートシティ、ビルディング、ホームの実現を目指しています。
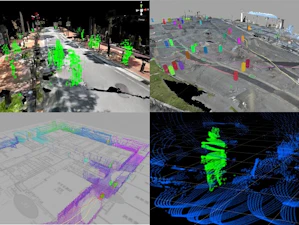


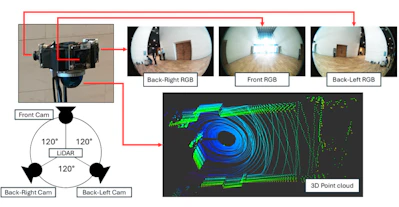
LiDAR (Light Detection and Ranging) による3次元点群データを用いた屋外内・公共空間における人流デジタルツインの構築
- Hirozumi Yamaguchi, Hamada Rizk, Tatsuya Amano, Akihito Hiromori, Riki Ukyo, Shota Yamada, Masakazu Ohno, Towards intelligent environments: human sensing through 3D point cloud, Journal of Reliable Intelligent Environments, vol. 10, pp. 281–298 (2024) (Q1 Journal)
- Masakazu Ohno, Riki Ukyo, Tatsuya Amano, Hamada Rizk, Hirozumi Yamaguchi, Privacy-preserving pedestrian tracking with path image inpainting and 3D point cloud features, Pervasive and Mobile Computing, Volume 100, May 2024. 101914 (Q1 Journal)
- Masakazu Ohno, Riki Ukyo, Tatsuya Amano, Hamada Rizk, Hirozumi Yamaguchi, Privacy-preserving Pedestrian Tracking using Distributed 3D LiDARs The 21st International Conference on Pervasive Computing and Communications (PerCom 2023), pp.43-52 (CORE A* Top Confence)
- 大阪大学発スタートアップ企業 HULIX 立ち上げ
など.歩行者のトラッキングや軌跡の解析はナビゲーションや施設設計,避難計画,経路解析といったヒューマンセントリックなアプリケーションを実現する上で近年重要視されてきています. 我々はLiDAR(Light Detection and Ranging)やカメラを用いた実世界の人流・モビリティ把握技術に加えて,部分的に観測されたそれらのデータからシミュレーション上に人流・モビリティを再現する技術の開発に取り組んでいます.詳しくはこちら

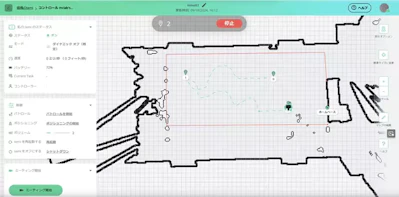
LiDAR, Cameraと大規模言語モデルを用いたロボットナビゲーション Xuqing Liu, Ahmed Farid, Riki Ukyo, Tatsuya Amano, Hamada Rizk and Hirozumi Yamaguchi, "LLM-Driven Adaptive Autonomous Robot Navigation via Multimodal Fusion for Diverse Environments", IEEE IV 2024 (To appear)
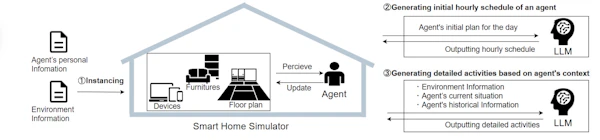
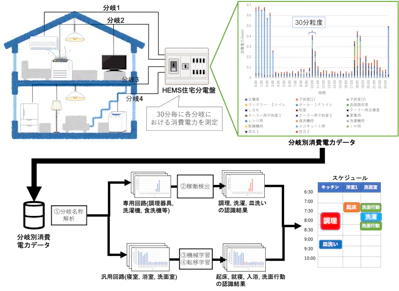
HEMS (Home Energy Management System)/ BEMS (Building Energy Management System)データ活用・スマートホーム
- H. Yonekura, F. Tanaka, T. Mizumoto and H. Yamaguchi, "Generating Human Daily Activities with LLM for Smart Home Simulator Agents," 2024 International Conference on Intelligent Environments (IE), 2024, pp. 93-96 (BEST SHORT PAPER AWARD)
- F. Tanaka, T. Mizumoto, H. Yamaguchi, "Recognition of House Structures from Complicated Electrical Plan Images," Information, Vol.15, No.3, pp. 147, March, 2024.
など
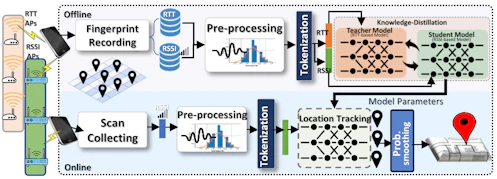
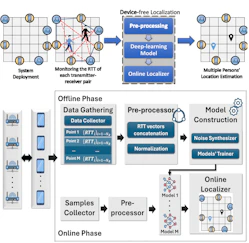
携帯基地局電波・Wi-Fi RTTなどを活用した屋内位置推定の高度化技術
- H. Rizk, A. Elmogy, M. Rihan, H. Yamaguchi, "TimeSense: Multi-Person Device-Free Indoor Localization via RTT," IEEE Internet of Things Journal, 2024.
- Hamada Rizk, Moustafa Abbas, Moustafa Youssef, "Device-Independent Cellular-based Indoor Location Tracking Using Deep Learning," Pervasive and Mobile Computing (PMC). (Q1 Journal)
など
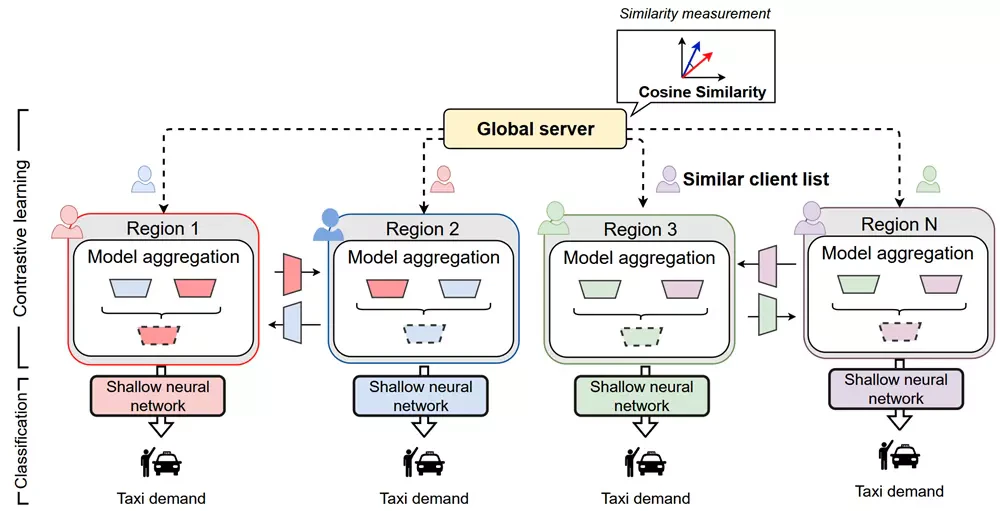
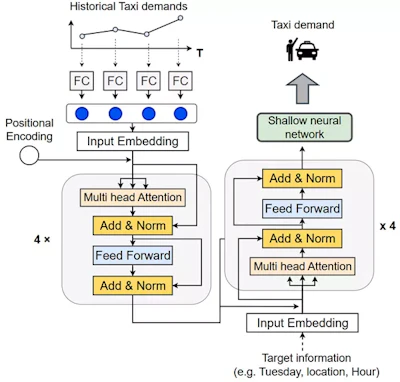
プライバシー保護型分散データ活用タクシー需要予測システム Ren Ozeki, Haruki Yonekura, Hamada Rizk and Hirozumi Yamaguchi, Privacy-Preserved Taxi Demand Prediction System Utilizing Distributed Data, The 32nd ACM International Conference on Advances in Geographic Information Systems (SIGSPATIAL '24) (CORE A Rank, 地理空間情報に関する著名国際会議)












