Japan experiences frequent natural disasters, including large-scale earthquakes. As seen in the case of the Great Hanshin-Awaji Earthquake, delayed victim discovery significantly reduces survival rates, emphasizing the need for rapid search and rescue operations. Drones offer flexible search capabilities, and recent advancements have focused on developing drone-assisted victim rescue systems. This study aims to achieve autonomous victim detection by integrating 3D LiDAR-equipped drones with machine learning, ensuring efficient searches unaffected by time of day or environmental conditions.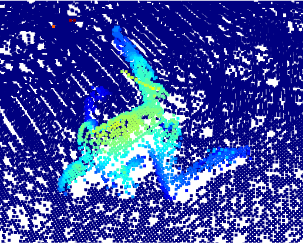

Victim Detection Based on Shape Features from 3D Point Clouds
Keywords
Drone LiDAR Victim Detection





