Sports events, concerts, and live performances attract large crowds, and the congestion during the return home after such events increases the risk of accidents, obstruction of emergency evacuations, and crime, posing a threat to public safety.
Therefore, appropriate crowd management, traffic planning, and security enhancements are required.
In particular, congestion mitigation through behavioral changes, such as phased departures and circulation promotion, has gained attention.
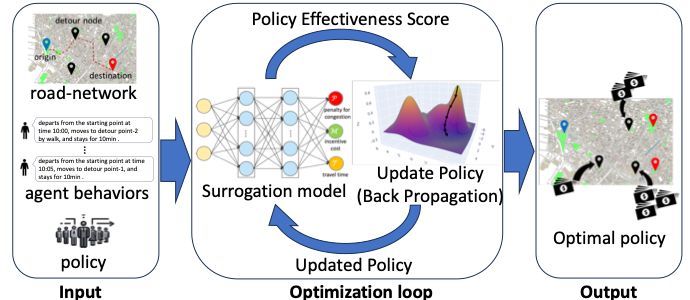
However, predicting the effectiveness and cost efficiency of such policies is challenging, and large-scale simulations require significant time, making traditional methods inefficient for optimal policy exploration.
To address this issue, this study constructs a surrogate model of a multi-agent simulation using neural networks and utilizes the gradient information of this model to efficiently search for optimal policies, enabling the rapid derivation of effective policies.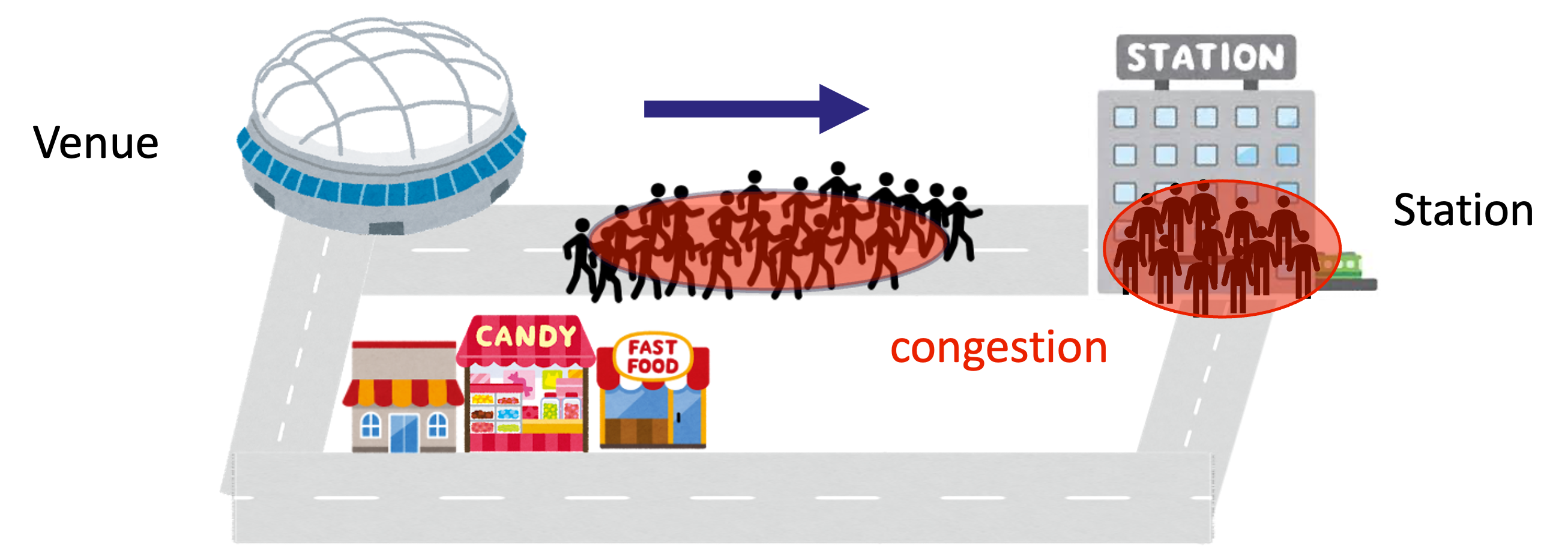
Published Papers:
- 田中福治, 天野辰哉, 内山彰, 廣森聡仁, 山口弘純, 中村佑輔, 小出英理, 勝間田優樹, “匿名化処理されたメッシュ間移動データからの人流再現手法の検討,” モバイルコンピューティングと新社会システム (MBL-105) , pp1-3, 2022年11月.
- 田中福治, 天野辰哉, 内山彰, 廣森聡仁, 山口弘純, 中村佑輔. (2024). ニューラルネットワークを用いた歩行流制御施策の最適化手法の提案と評価. 研究報告モバイルコンピューティングと新社会システム (MBL), 2024(15), 1-8. https://ipsj.ixsq.nii.ac.jp/records/232575
- 田中福治, 天野辰哉, 内山彰, 廣森聡仁, 山口弘純, 中村佑輔. (2024). 模倣学習型ニューラルネットワークを活用した歩行流制御施策の最適化. 第 86 回全国大会講演論文集, 2024(1), 41-42. https://ipsj.ixsq.nii.ac.jp/records/236338
- F. Tanaka, T. Amano, A. Uchiyama, A. Hiromori, Y. Nakamura and H. Yamaguchi, "Policy Optimization for Pedestrian Traffic Management by Surrogation of Simulation Models," 2024 IEEE 21st International Conference on Mobile Ad-Hoc and Smart Systems (MASS), Seoul, Korea, Republic of, 2024, pp. 203-211, https://ieeexplore.ieee.org/document/10723552





