In recent years, there has been an increasing demand for systems that improve safety to limit the rapid spread of COVID-19.
In particular, it is important to record human contact behavior to prevent the spread of infection in a public closed space such as a school or a company.
And it is essential to record human-to-human contact in real-time to track infections, and a personal identification technique is required to realize such a system. The most basic person identification method is to use a camera.
However, the camera is highly privacy-invasive and cannot be installed in places that may be directly related to privacy, such as toilets and changing rooms.
Also, psychologically, it seems that many people are reluctant to take pictures directly with a camera.
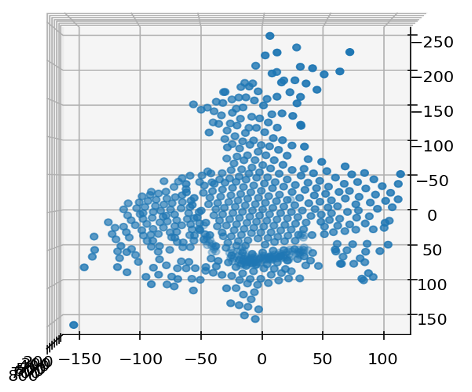
Therefore, we identify people using a small depth sensor that can obtain 3D point cloud data that is not as invasive as a camera.
A 3D point cloud is obtained by sensors called LiDAR and represented as a set of points. Since the representation is a set of points, attributes such as gender, age, and physique cannot be understood by looking at it with the naked eye.
There are many challenges in identifying people using 3D point clouds,
It can be divided into the characteristics of the sensor and the characteristics of 3D point cloud data representation.
The problem with the characteristics of the sensor is that the point cloud obtained is sparse, and noise is included.
This reduces the number of point clouds obtained and makes it challenging to extract character-specific features.
The problem of representing 3D point cloud data is that point cloud data does not have a fixed data structure, unlike images. In other words, the size of point cloud data varies.
We are trying to solve these problems by proposing multiple modules.
Published Papers
- Yamada, S., Rizk, H., & Yamaguchi, H. (2022, March). An accurate point cloud-based human identification using micro-size lidar. In 2022 IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events (PerCom Workshops) (pp. 569-574). IEEE.
- Shota, Yamada, Hamada Rizk, and Yamaguchi Hirozumi. "Human Identification Based On Point Cloud Captured By Small-Size LiDAR." 研究報告高度交通システムとスマートコミュニティ (ITS) 2022.38 (2022): 1-8.





