This study introduces a lightweight machine learning framework for forecasting the merging points of vehicles on on-ramps. Our model, in contrast to prior deep learning methods, provides a practical solution that balances high precision with acceptable training and inference expenses. Our system uses the YOLO v5 object detector to identify vehicles from video footage captured by a stationary camera, tracks vehicles using our newly developed original tracker, generates vehicle merging data, and employs eXtreme Gradient Boosting (XGBoost) to test the merging points prediction. The model uses multivariate multiple regression to forecast several decision-making points (DPs) along the on-ramp lane, taking into account the positions and velocities of the merging vehicle and its four neighboring vehicles. These DPs mimic the decision-making process of human drivers.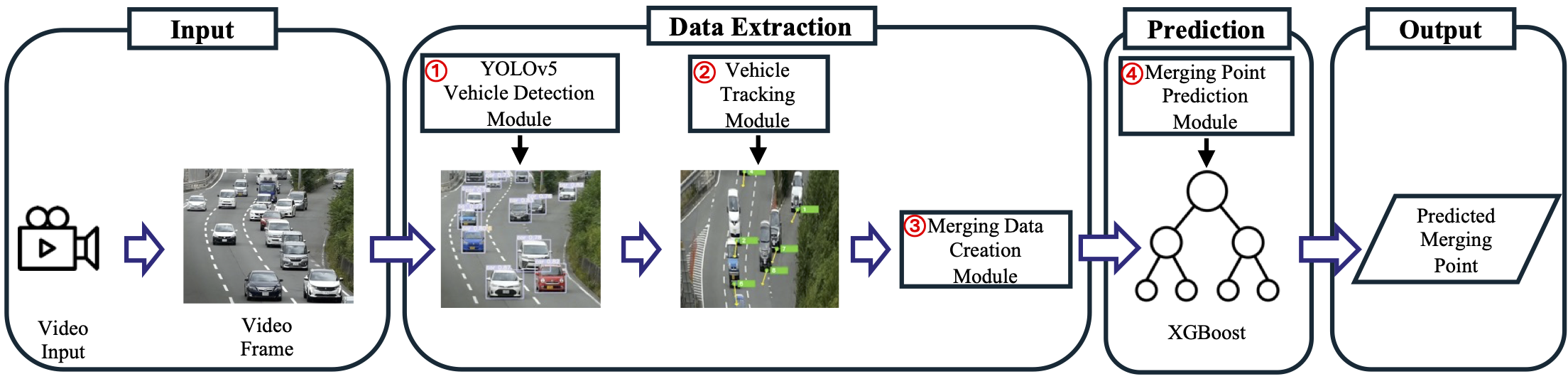
Published Papers
- Doyoon Lee, 廣森 聡仁, 高井 峰生, 山口 弘純, 西村 友佑, 長村 吉富, 竹嶋 進, "Lightweight Merging Point Prediction on Highway On-Ramps Using Regression Techniques", 7月, DICOMO 2024, https://ndlsearch.ndl.go.jp/books/R100000136-I1050020444520872448
- Doyoon Lee, Akihito Hiromori, Mineo Takai, Hirozumi Yamaguchi. Efficient On-Ramp Merging Point Prediction Using Machine Learning. 27th IEEE International Conference on Intelligent Transportation Systems (ITSC 2024). 2024, https://its.papercept.net/conferences/scripts/abstract.pl?ConfID=87&Number=703





