Digital twin technology is attracting attention as a technology that reproduces objects and systems in physical space in virtual space and coordinates their behaviors and states in real time. In this laboratory, as part of the development of smart city infrastructure technology, research on human flow digital twin is being conducted, and a system called “Hitonavi,” which detects and tracks the location of pedestrians in a building using LiDAR sensors, is being developed. Therefore, we propose an adaptive indoor navigation system that utilizes the human flow digital twin, which predicts human flow based on the location coordinates of pedestrians in a building obtained from Hitonavi, and reflects this information in cost values.
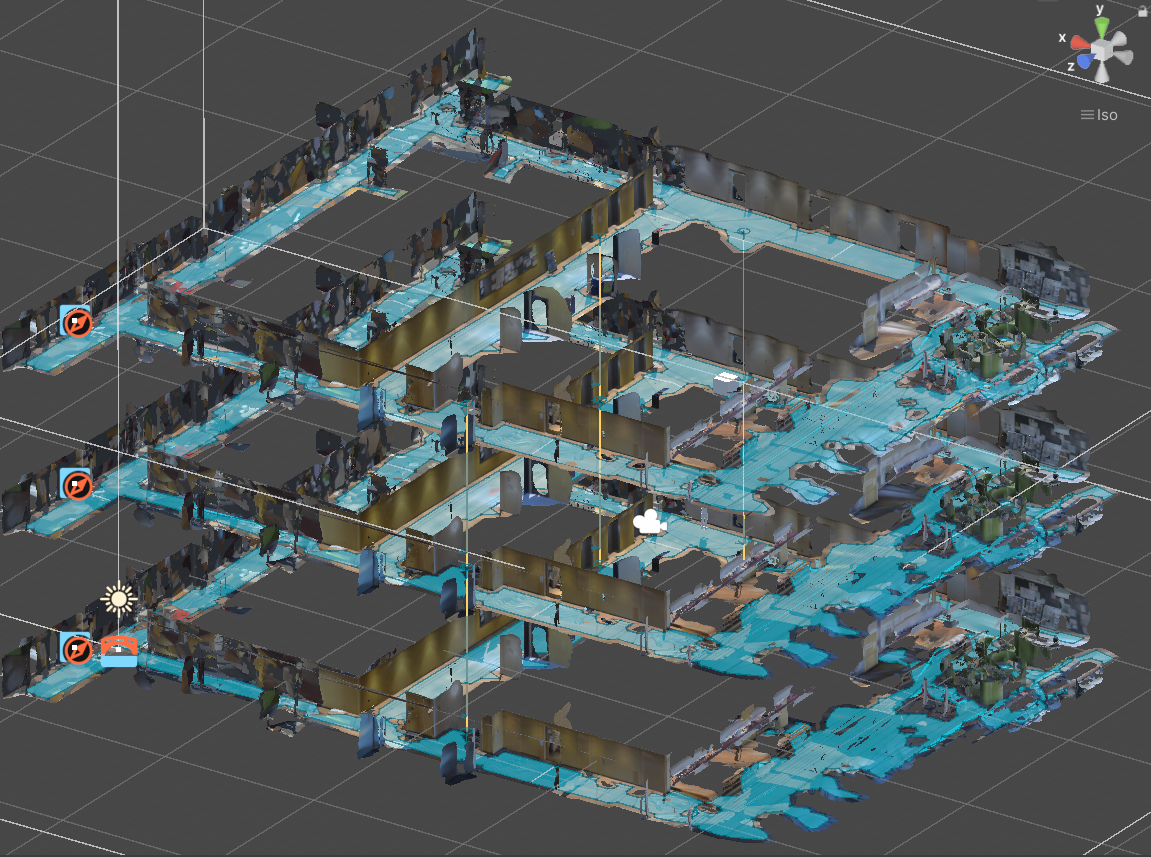
The system first scans a building using the scaniverse and reproduces it in Unity space. The reproduced building reflects the human flow obtained from Hitonavi. Paths are calculated in this space. A graph was created to calculate the cost of five factors that are load when people move: the density of people in the vicinity of the route, the amount of people passing each other while moving, the amount of people who must pass each other while moving, the probability of people occurring on the route while moving, and the physical distance between the route and the person. We also designed an algorithm that uses the A* algorithm to search for the route with the lowest cost on the graph.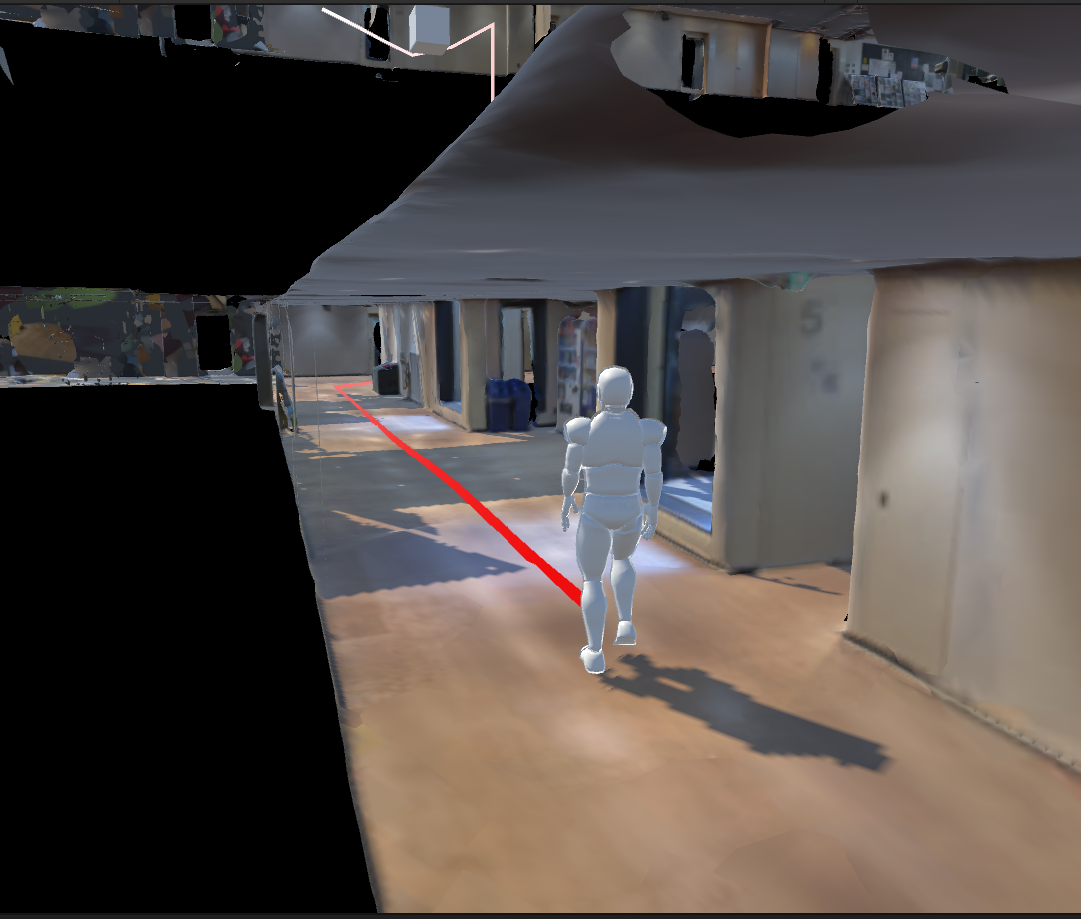
Published Paper
- 矢野敦大, et al. "AR ヘッドセットによる屋内ナビゲーションシステムの構築." 研究報告高度交通システムとスマートコミュニティ (ITS) 2024.8 (2024): 1-1.





