In recent years, electric scooters (E-Scooters) have rapidly gained popularity worldwide as a key mode of micromobility. Due to their convenience, low carbon emissions, and high adaptability to urban environments, many cities have incorporated them into shared transportation systems. However, with the increasing adoption of E-Scooters, the number of traffic accidents involving them has also risen significantly.
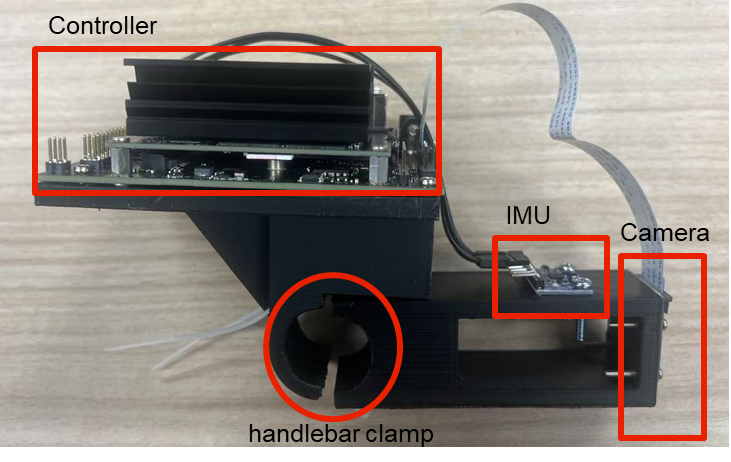
Since electric scooters operate on both roadways and sidewalks, ensuring safety presents a major challenge. Moreover, due to constraints such as the small size of control modules, the types of sensors that can be used, and limited power supply, existing autonomous driving and safety assistance systems designed for automobiles are not directly applicable to E-Scooters.
The primary objective of this research is to develop a system that can perform real-time hazard prediction and route recommendations across diverse riding environments using a compact edge computing device. In the future, this system can be leveraged as a node to build a more advanced smart city traffic support network.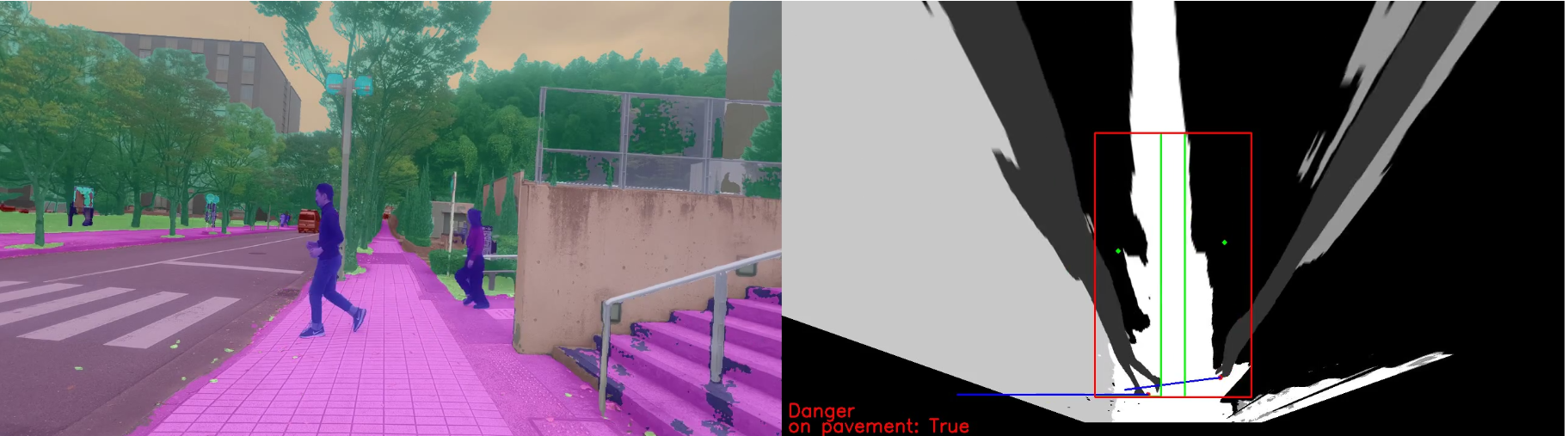
Traffic Safety Assistance System for Electric Scooters
Keywords
Electric Scooter (E-Scooter) Micromobility Traffic Safety Edge Computing Real-Time Hazard Prediction Route Recommendation Safety Assistance Systems





